-
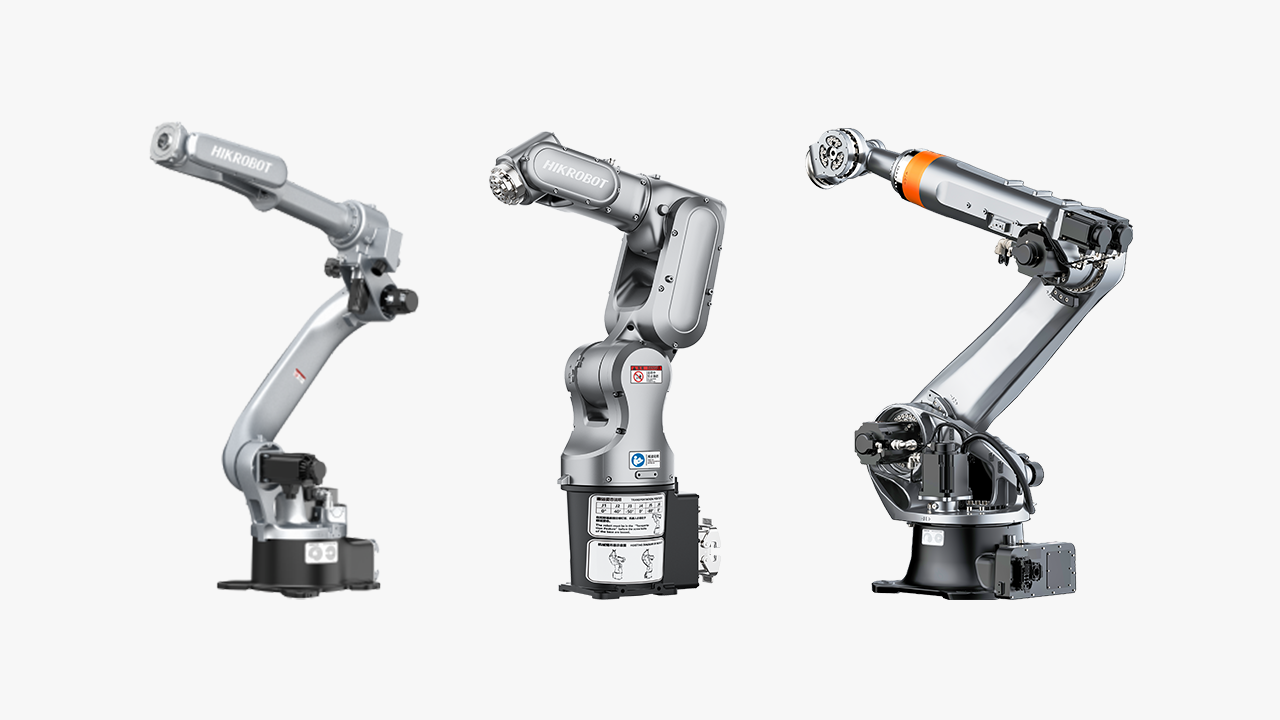 关节机器人
关节机器人 -
 超景深3D数码显微镜
超景深3D数码显微镜 -
 无人机
无人机 -
 工业扫码设备
工业扫码设备
产品详情
产品参数
功能特性
高刚性结构设计,拥有高速、高精度的运行性能
预设走线通道,便于管线集成,减少空间占用,使作业更灵活
整机防护等级IP54,手腕防护等级IP67,可应对粉尘和高湿度场景
双电池接口设计,防止电池更换时编码器数据丢失
应用行业
汽车、汽配、金属加工、新能源、物流等



| 型号 | 型号 | HAR165-2700 |
| 名称 | 165kg负载,2700mm臂展,通用型多关节机器人本体 | |
| 基本参数 | 可达半径 | 2701mm |
| 额定负载质量 | 165kg | |
| 最大负载质量 | 270.1kg | |
| 位置重复精度 | ±0.06mm | |
| 防护等级 | 本体IP54,手腕IP67 | |
| 安装方式 | 落地安装 | |
| 机器人质量 | 942kg | |
| 适用控制柜 | HRC-G | |
| 工作范围 | J1 | -180°~+180° |
| J2 | -76°~+60° | |
| J3 | -79°~+180° | |
| J4 | -360°~+360° | |
| J5 | -120°~+120° | |
| J6 | -360°~+360° | |
| 最大速度 | J1 | 130°/s |
| J2 | 115°/s | |
| J3 | 115°/s | |
| J4 | 140°/s | |
| J5 | 120°/s | |
| J6 | 260°/s | |
| 环境 | 存储温度 | -25℃~55℃ |
| 工作温度 | 0℃~45℃ | |
| 噪音水平 | ≤80 dB | |
| 湿度 | ≤95%(无凝露) | |
| 负载力矩 | J4 | 1060 N·m |
| J5 | 1060 N·m | |
| J6 | 590 N·m | |
| 负载转动惯量 | J4 | 96 kg·m² |
| J5 | 96 kg·m² | |
| J6 | 50 kg·m² |